So here is my problem. It is quite difficult to get good resolution on a high revving engine when all the tick marks are crammed into a 270-300 degree clock face. For example, if a shift point is around 9,500-10,000 rpm, usually everything (in my application) below 6,000-7,000 rpm is useless noise. I would love to display only the top 2,500-3,000 rpm in that same 300 degree window with the correspondly wider tick marks giving much better resolution. My apologies to our motorcycle friends for inferring that 10k rpm was a high number.


 LinkBack URL
LinkBack URL About LinkBacks
About LinkBacks



 Reply With Quote
Reply With Quote




 one of your frames back in the day :-)
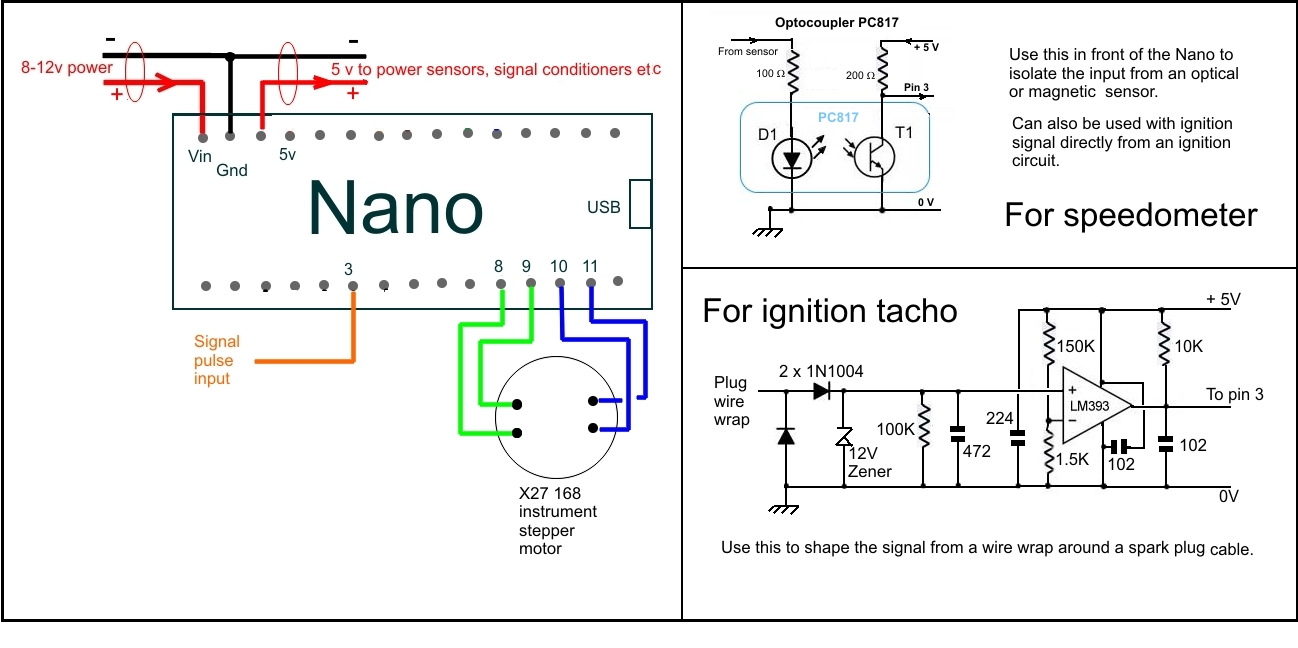
I'm a bit of a 'Nano' fan - and I've been trying to put together a program to drive shift lights. There are a number already out there - but the various different approaches only serve to confuse (me).
Having been told in no uncertain terms that my bike racing days are over - t "Pin It")
 ) was: do you consider the interrupt method to be the most appropriate and "Pin It")


Bookmarks