
 LinkBack URL
LinkBack URL About LinkBacks
About LinkBacks



Hi All
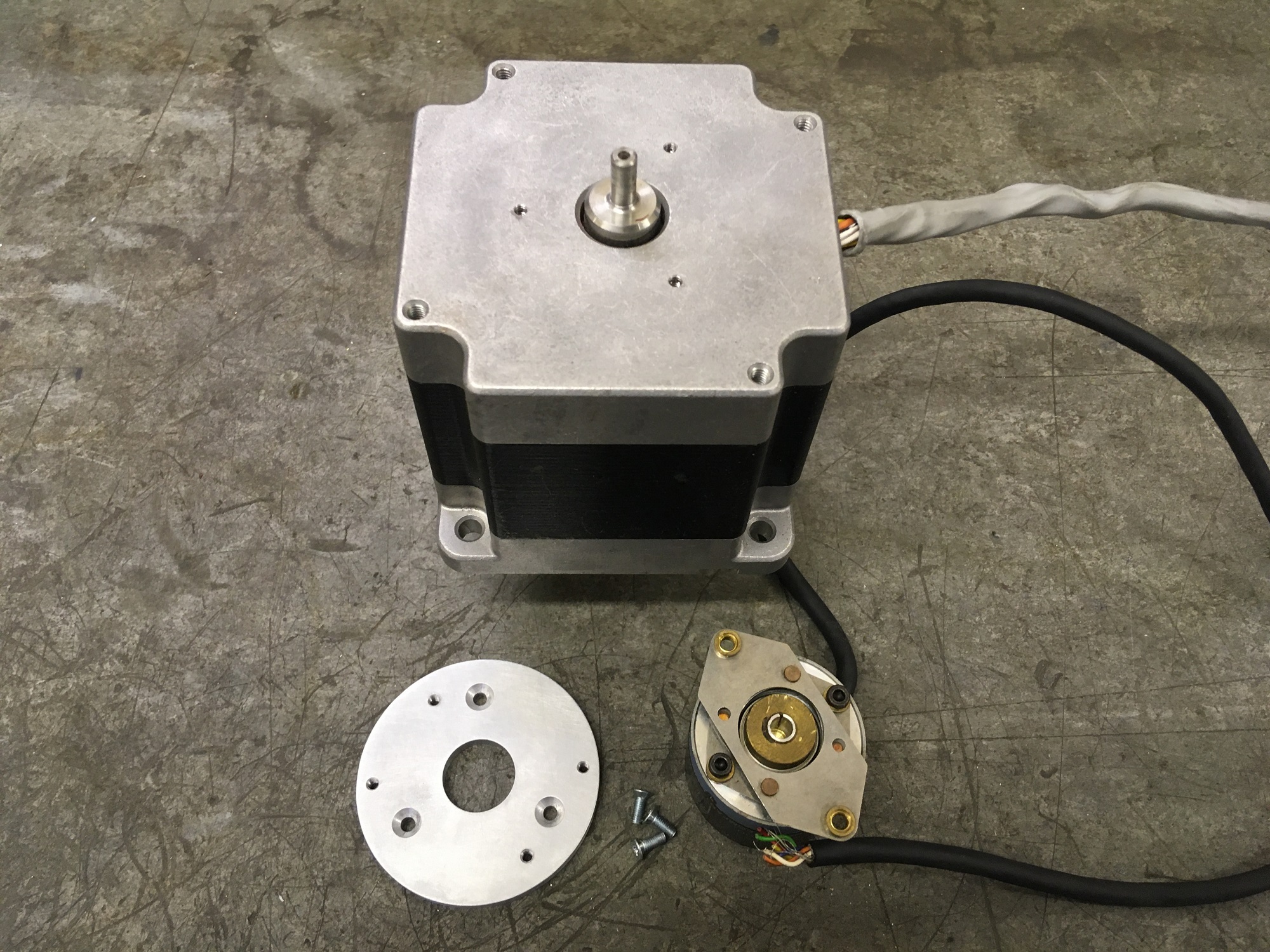
I have made the mounting plate so the Nema 34 stepper motor can have the encoder mounted to its back shaft.
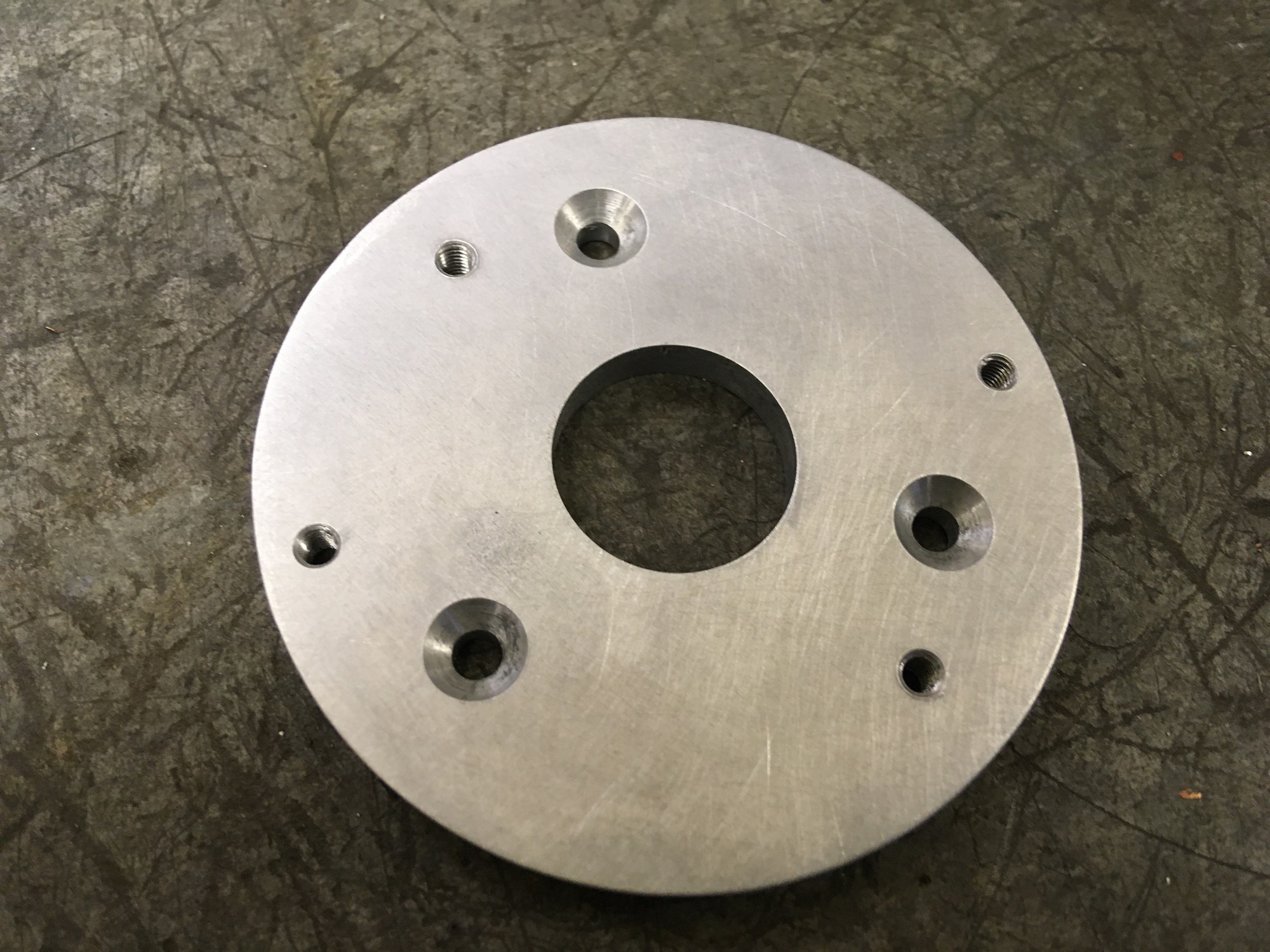
This mounting plate is basically a washer 5mm thick and 60mm diameter with an 18mm hole. Mounting holes are drilled/countersunk and tapped holes for M3 screws.
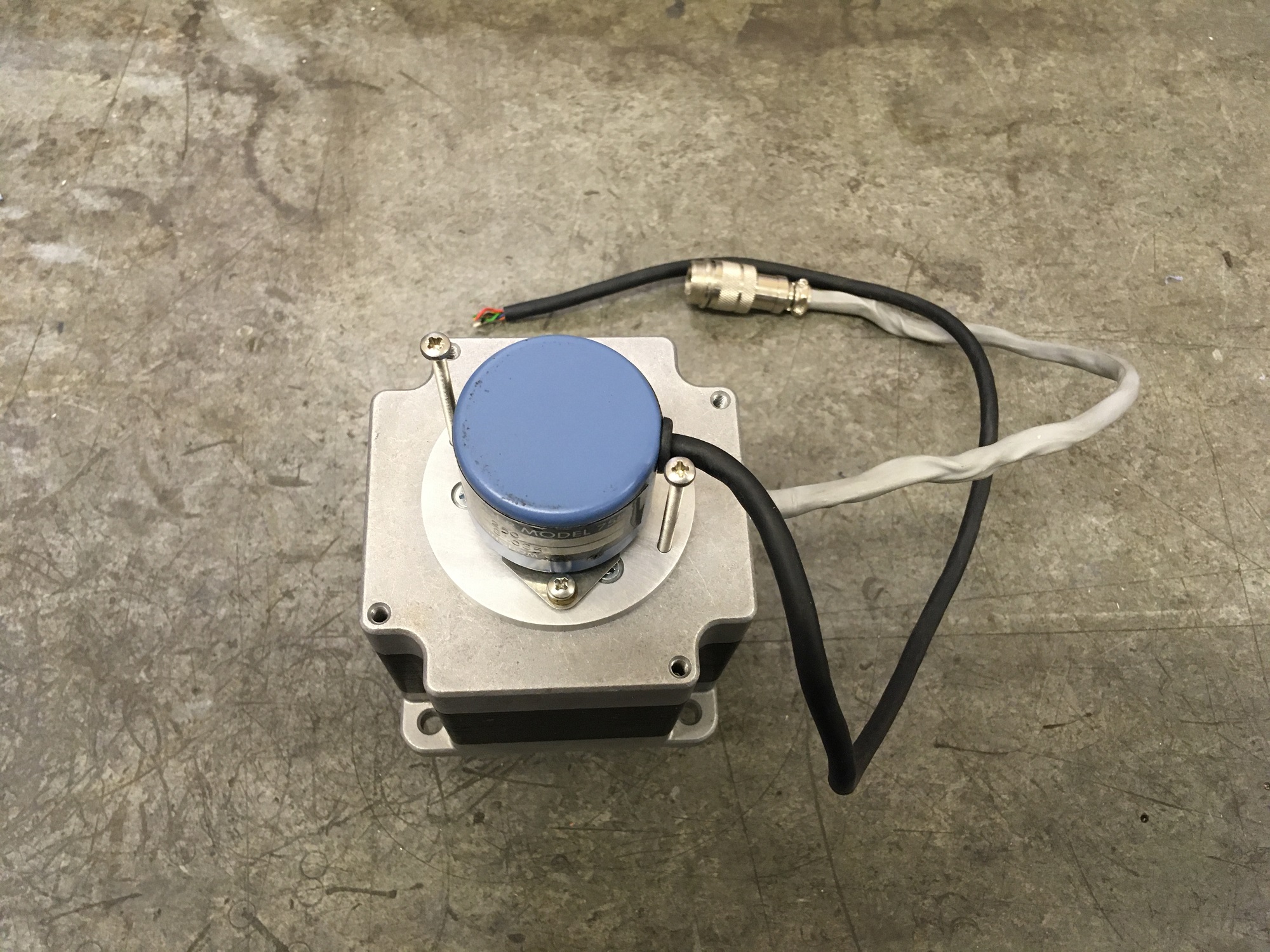
There will be a cover made at a later date which will be held in place by the two long screws. (see photos)
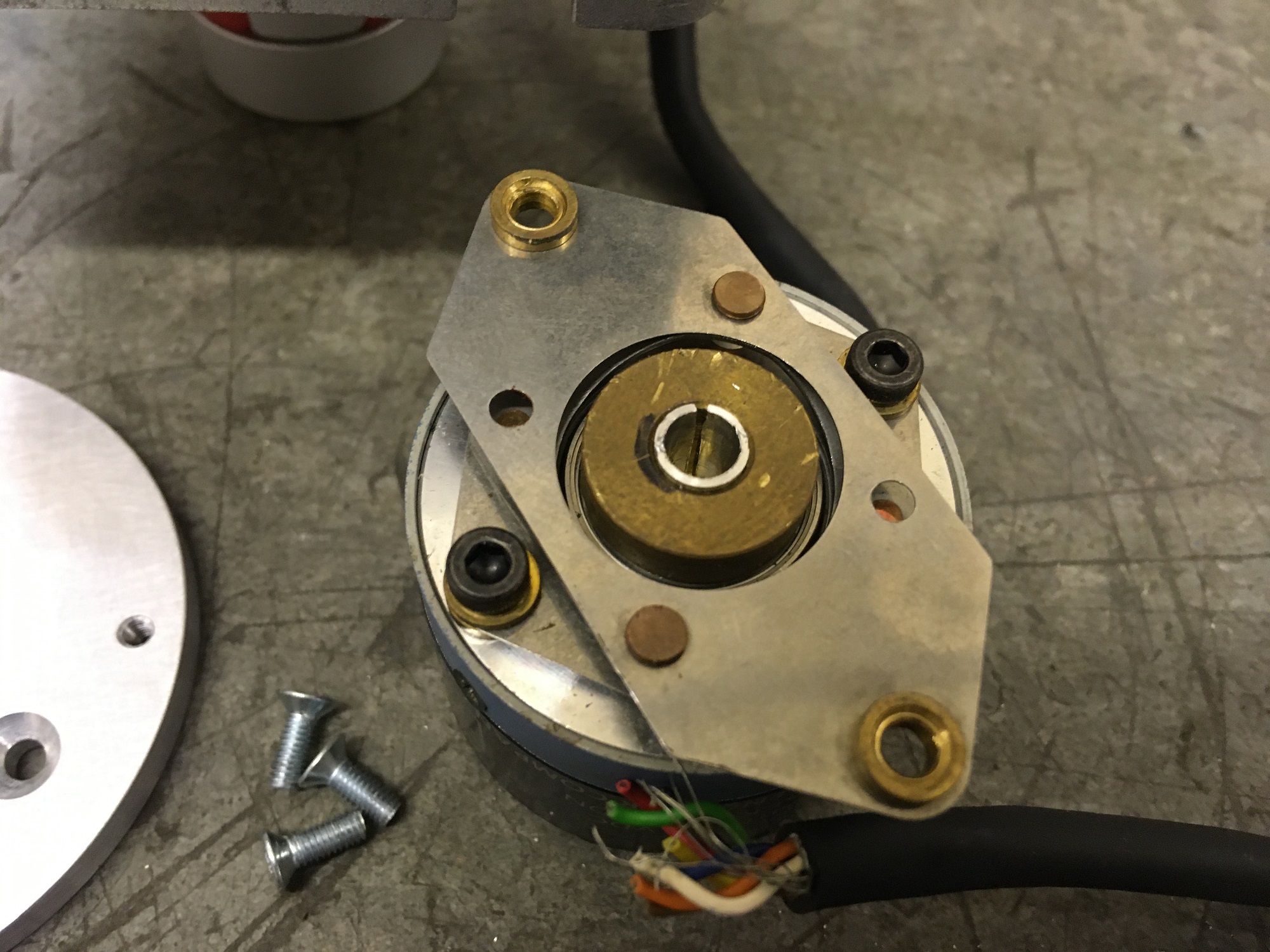
I also had to make a reducing split bush to go from 0.250" to 5 mm so it would fit the motor shaft. This is secured via two grub screws from the encoder to clamp the shaft.
The next step is to solder the plug to the correct wires to see if it will read using the arduino.
Mounting plate
Ready for assembly

Reducing bush
Ready to be wired to plug

Two long screws for cover (still to be made)
Thank you for viewing
The Home Engineer




 Reply With Quote
Reply With Quote

Bookmarks