
 LinkBack URL
LinkBack URL About LinkBacks
About LinkBacks



hi All
I have finally attached the stepper motor and encoder and had the rotary table moving.
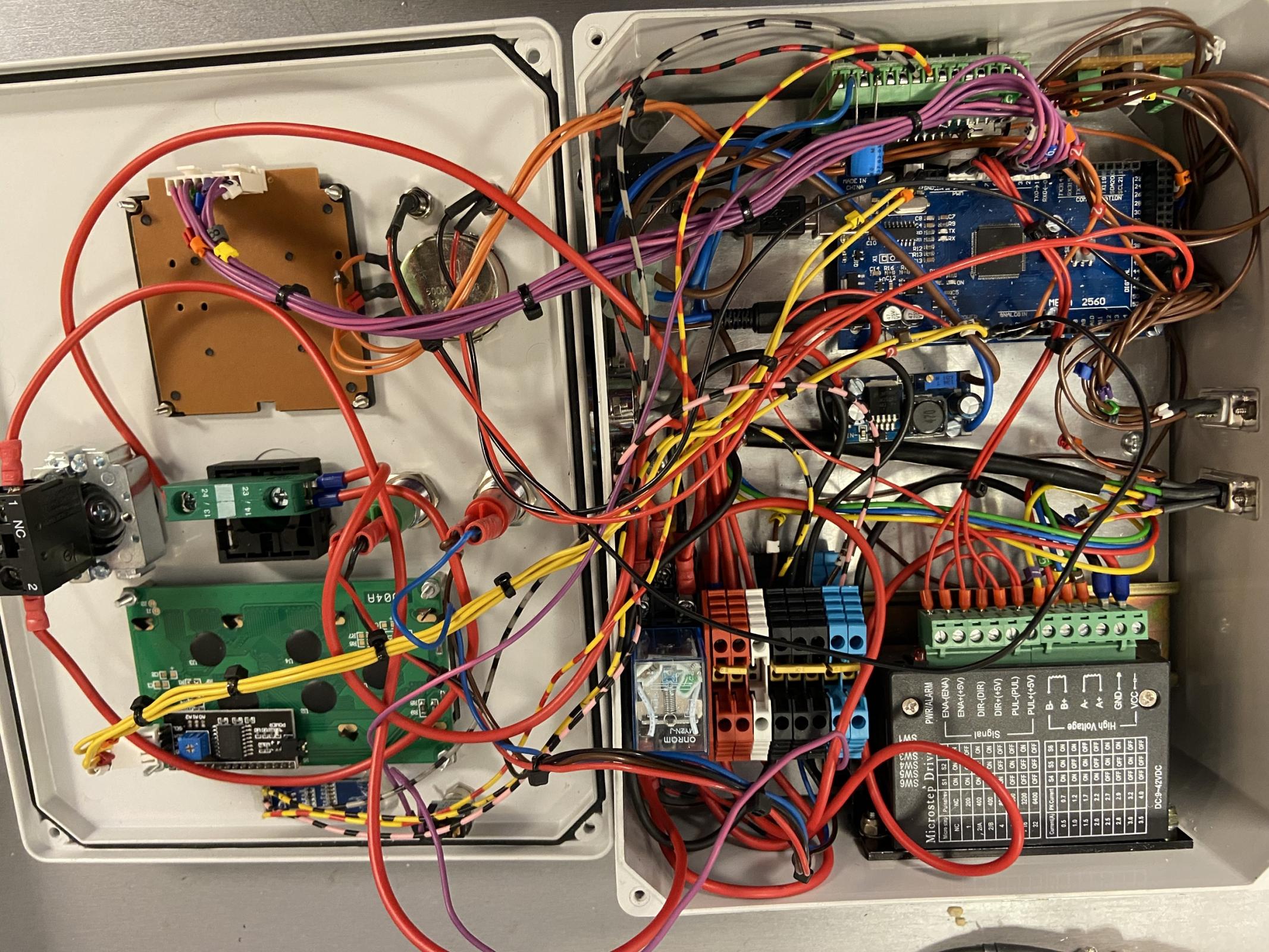
After testing there are a couple of issue that need attention 1st being the variable feed/speed control via a potentiometer. When turned to full rotation it stalls the motor. 2nd I need to check the coupling is tight on the motor shaft and the control box wiring is somewhat messy and will need tidying but as this is the first time I have ever taken on a project like this. It was very much a, make it up as you go along just to get it working and then worry about the presentation at the end.
The main control is via a Arduino Mega and TB6600 motor controller and the encoder uses a Arduino Nano.
I did have a lot of help with the programming. Without this help, I don't think I would have completed the project with all the features I wanted.
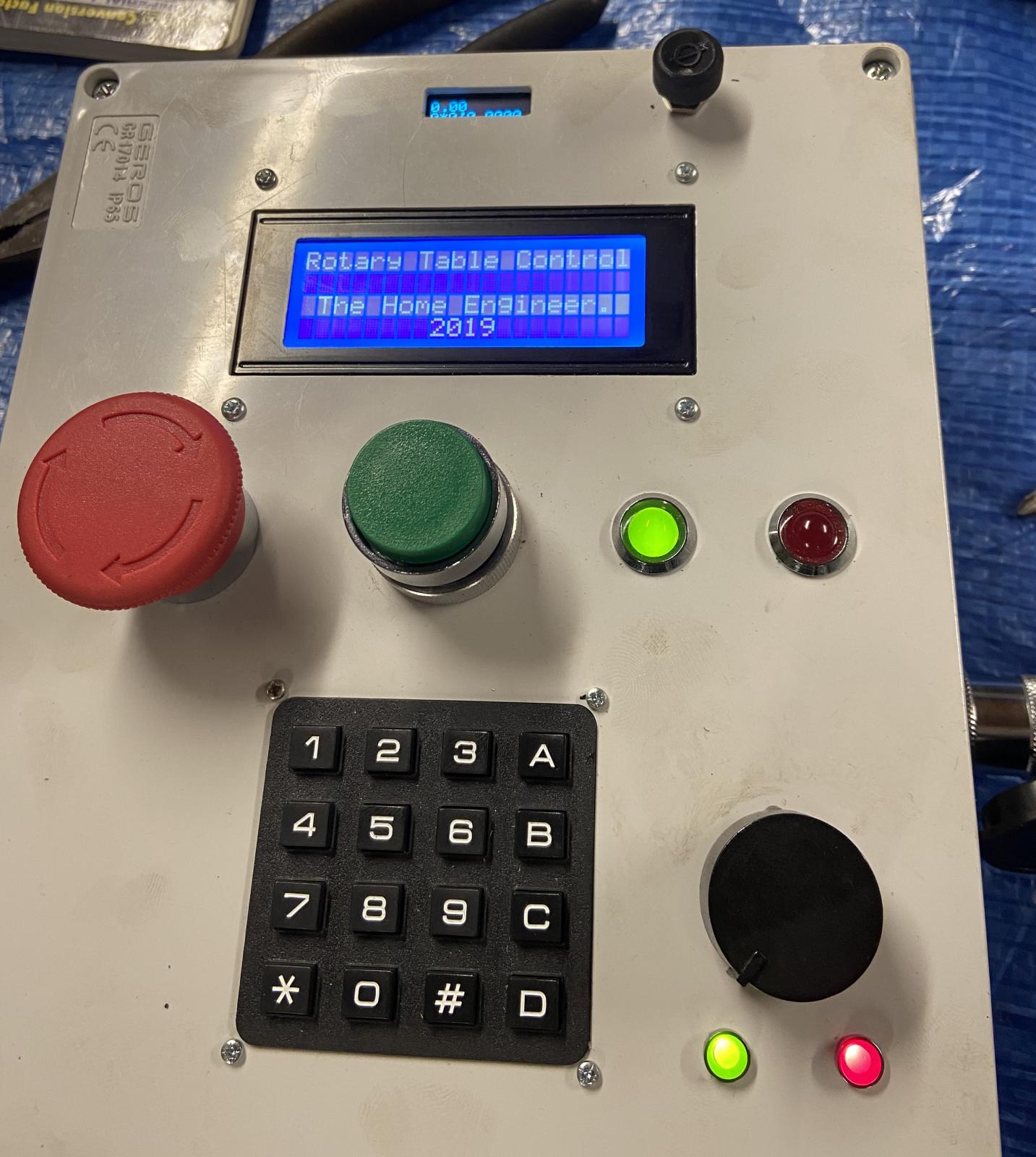
The control box has four modes. Degrees, Divisions, Jog and Feed. The Feed is controlled via a potentiometer, which I want to change how this controls the table.
Needs a little tidying
Start up
Options that can be selected
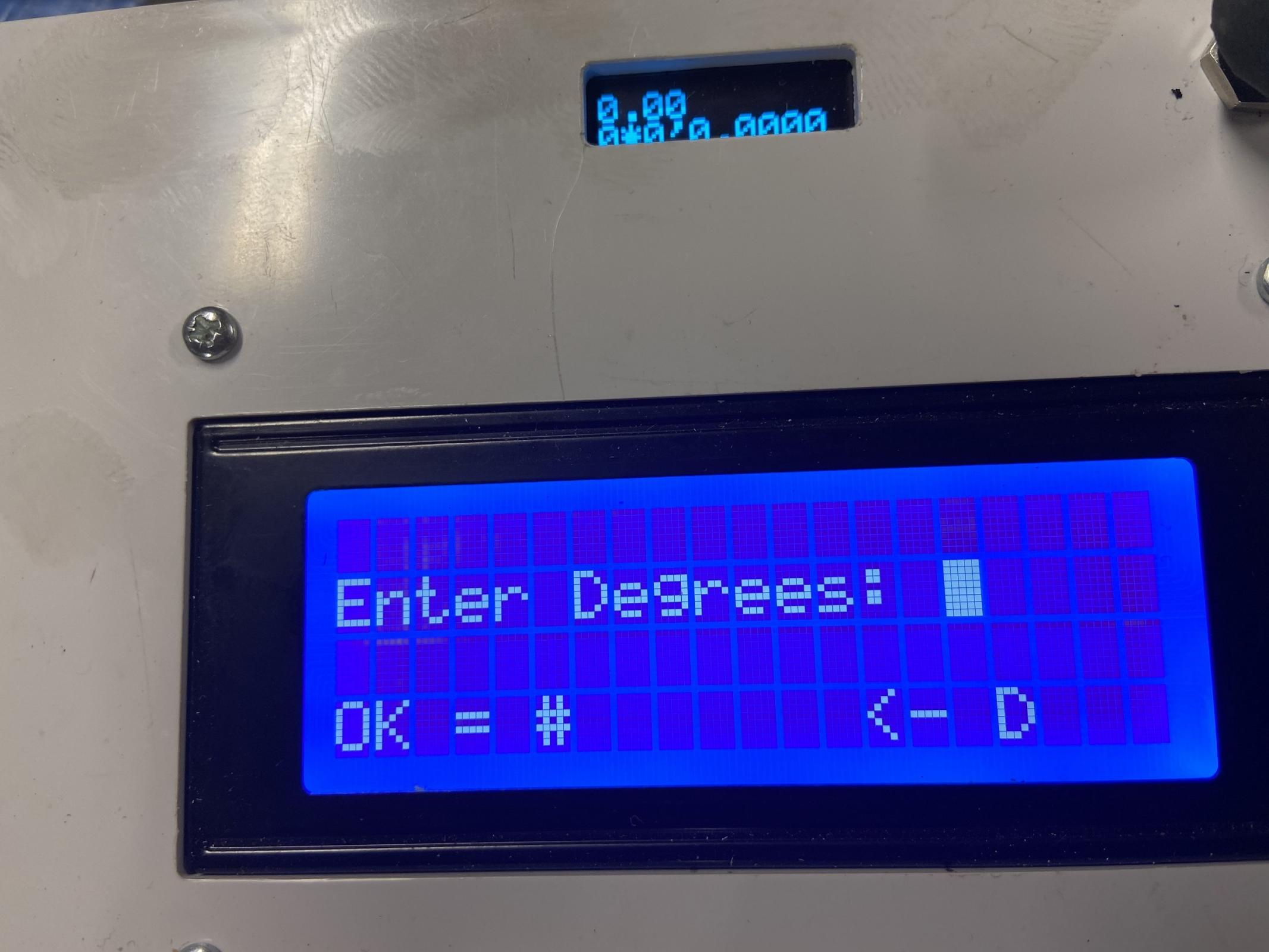
Degrees selected
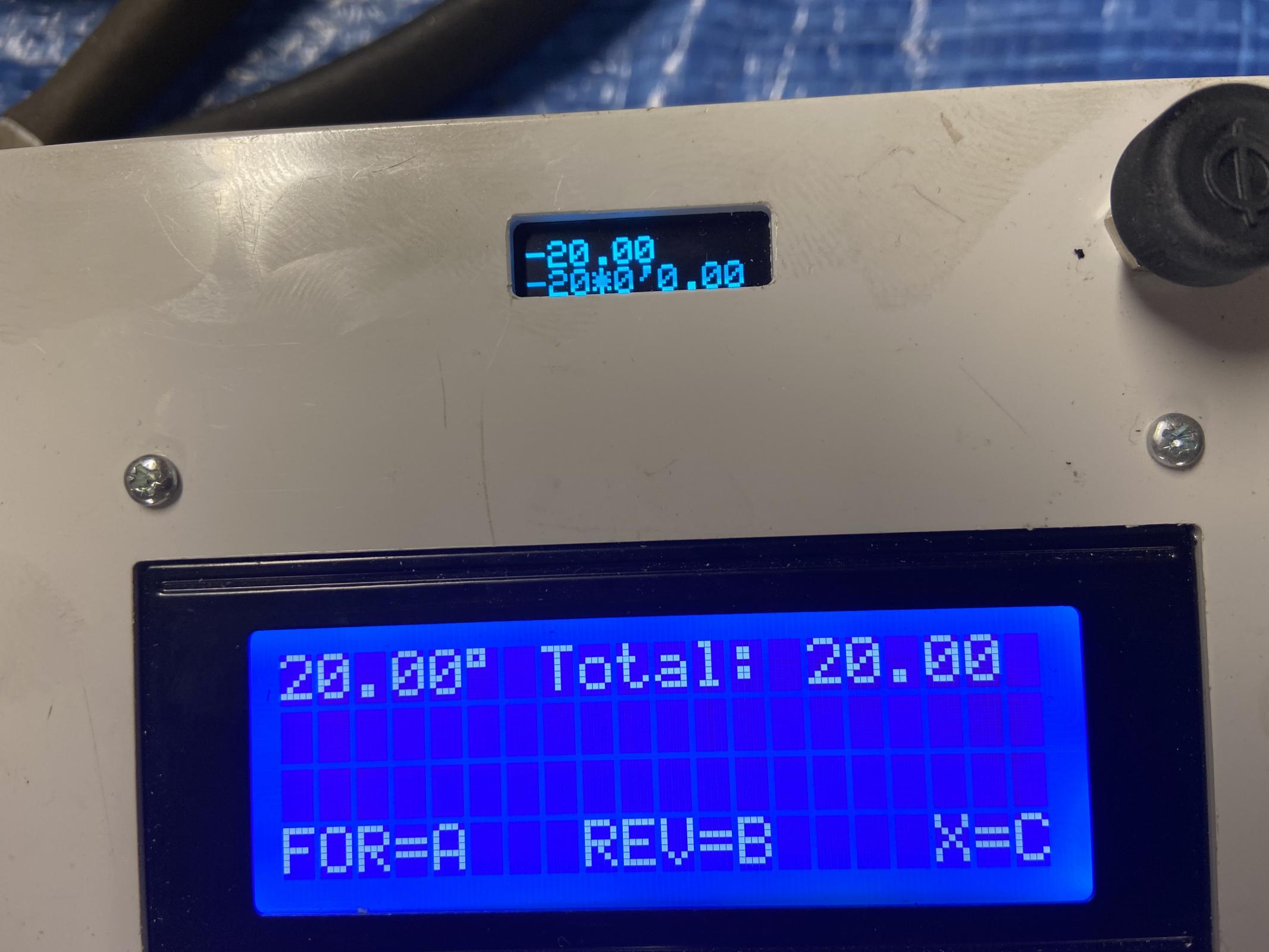
Selection set to 20 degrees and ready to move table.
Angle travelled and small top screen shows position via encoder. Very pleased with accuracy.
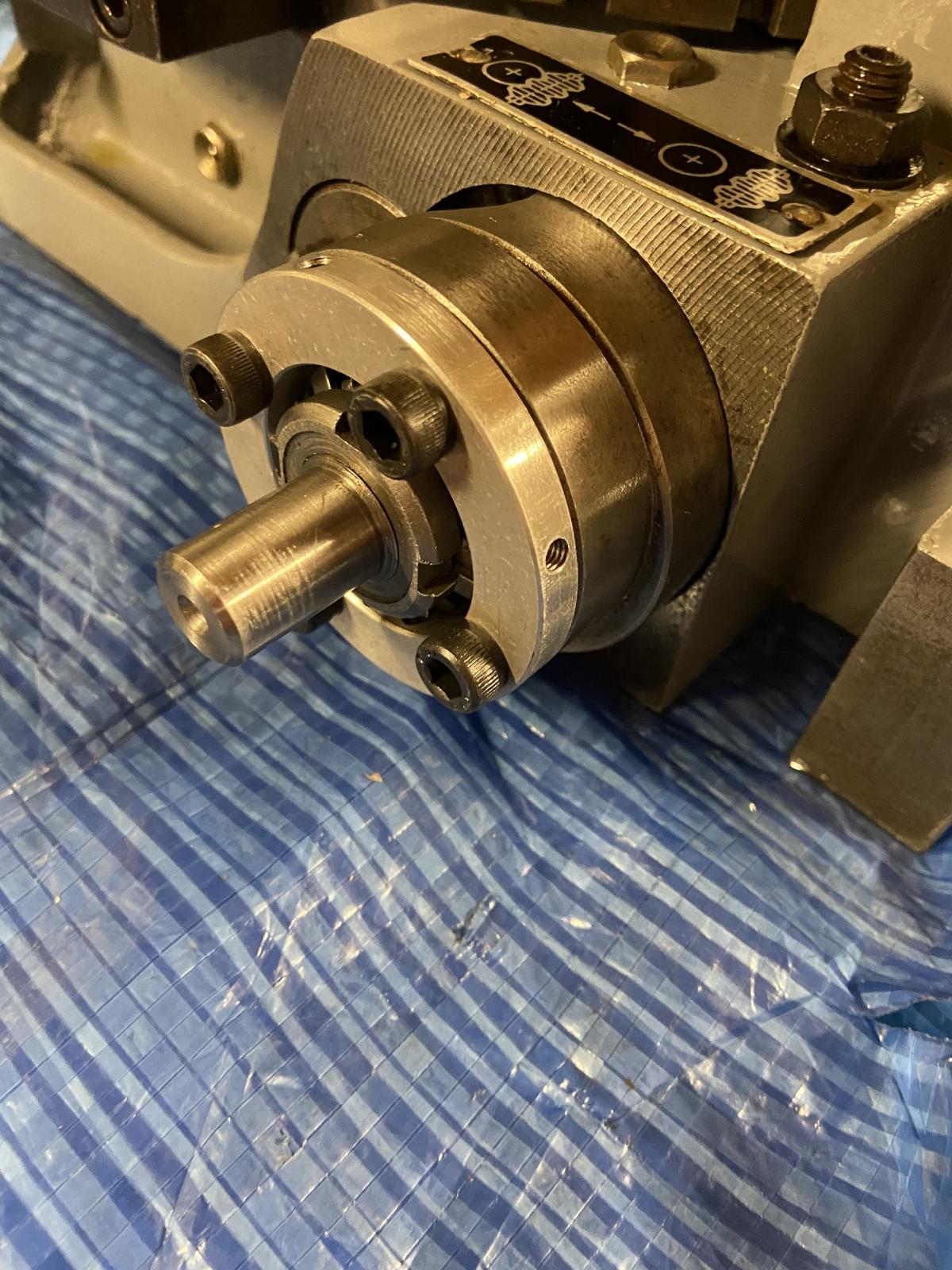
Aluminium adaptor plate to connect stepper motor to table

Motor and encoder in place
This project was a steep learning curve with many mistakes made some expensiveIt has been very interesting and frustrating at the same time, but as previously mentioned without the help of a very clever electronics apprentice where I work, I would have struggled to complete this project. So a massive thank you to him.
I have added some links below which are also linked to this project which I think has been roughly a 6 months in the making.
Links:
https://www.homemadetools.net/forum/rotary-table-re-ferb-ready-stepper-motor-75765
rotary table worm shaft
Comparing worm shaft depth with three wire method
Rotary table stepper motor encoder mounting plate and encoder bore reducer
Stepper motor encoder cover
Thank you for taking the time to view.
The Home Engineer







 Reply With Quote
Reply With Quote

Bookmarks